Research Highlights
Our research focuses on nonlinear dynamics and control, safety-critical control, and time delay systems with applications to connected automated vehicles, and robotic and autonomous systems.
Robust Safety-critical Control
Safe Human-Robot Collaboration
Climbing Robots in Distillation Columns
Collision-free Cooking with Manipulators
Model-free Safety on Robotic Systems
Learning for Safety and Performance
Safe Vision-based Control
Dynamic Motion Primitives on Legged Robots
Measurement-robust Safety-critical Control
Dynamics and Control of Connected Vehicles
Connected Heavy-duty Trucks
Control of Connected Automated Vehicles

Traffic Control by Connected Automated Vehicles

Traffic Prediction for Connected Vehicles
Safety of Time Delay Systems
Control of Epidemiological Models

Machine Tool Vibrations

Predictor Feedback Control
Robotic Systems
Safety-critical Control via Reduced-order Models
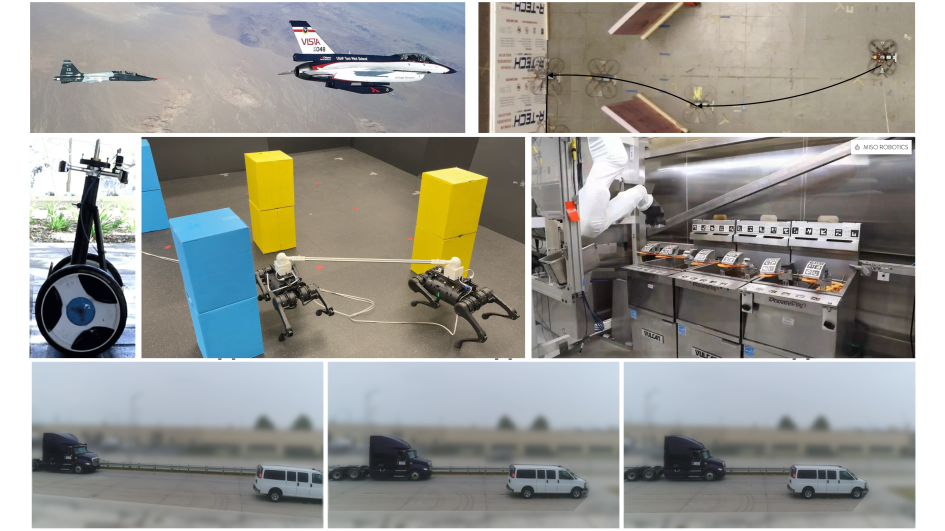
We established a framework to control autonomous systems – robotic systems and vehicles – with formal safety guarantees based on reduced-order models.
This approach has been implemented on several real-world systems: fixed-wing aircraft, quadrotors, wheeled robots, legged robots, manipulator, and heavy-duty truck.
Robust Safety-critical Control
We developed controllers for guaranteeing safety in the presence of real-life uncertainties and disturbances.
We implemented this method on various mechanical system models, including road vehicles and spacecraft.
Safe Human-Robot Collaboration
We proposed a framework to guarantee safety on robotic systems while satisfying the intention of a human operator, through a learning-based switching law between multiple backup controllers.
We implemented this method on a dual-track robot.
| [P32] |
Janwani et al., A Learning-Based Framework for Safe Human-Robot Collaboration with Multiple Backup Control Barrier Functions, ICRA 2024 |
Climbing Robots in Distillation Columns
In collaboration with Dow Chemical, we designed motion plans for quadrupedal robots that allow them to operate in chemical facilities, such as climb up and down in distillation columns.
Collision-free Cooking with Manipulators
In collaboration with Miso Robotics, we depeloped a safety-critical control algorithm that allows collision-free cooking with robotic manipulators by minimally modifying existing motion plans.
| [J18] |
Singletary et al., Safety-Critical Manipulation for Collision-Free Food Preparation, RAL/IROS 2022 |
Model-free Safety on Robotic Systems
We established a framework for safety-critical control of robotic systems based on reduced-order kinematics.
In case of trivial kinematic equations, this leads to model-free control.
We implemented the method on legged, wheeled and flying robots to execute obstacle avoidance tasks.
| [P29] |
Molnar et al., Safety-Critical Control with Bounded Inputs via Reduced Order Models, ACC 2023 |
| [J17] |
Molnar et al., Model-Free Safety-Critical Control for Robotic Systems, RAL/ICRA 2022 |
Learning for Safety and Performance
We used preference-based learning to tune robust safety-critical controllers for performant and provably safe behavior.
We implemented this method on a quadruped that is controlled by using on-board cameras, with robustness to disturbances and perception errors.
| [P26] |
Cosner et al., Safety-Aware Preference-Based Learning for Safety-Critical Control, L4DC 2022 |
Safe Vision-based Control
We used self-supervised learning to estimate the uncertainty of perception modules, such as stereo vision, and used this uncertainty estimate for robust safety-critical control.
| [P24] |
Cosner et al., Self-Supervised Online Learning for Safety-Critical Control using Stereo Vision, ICRA 2022 |
Dynamic Motion Primitives on Legged Robots
We developed a control method to safely transition between various motion primitives (such as lie, stand, walk or jump behaviors) on legged robots.
We implemented this approach on a quadruped.
| [P23] |
Ubellacker et al., Verifying Safe Transitions between Dynamic Motion Primitives on Legged Robots, IROS 2021 |
Measurement-robust Safety-critical Control
We established safety-critical controllers that are robust to perception errors, and we implemented them to execute obstacle avoidance tasks by a Segway using on-board cameras.
| [P22] |
Cosner et al., Measurement-Robust Control Barrier Functions: Certainty in Safety with Uncertainty in State, IROS 2021 |
Connected Automated Vehicles
Dynamics and Control of Connected Vehicles
We wrote a textbook on the topics of human driving behavior, longitudinal dynamics and control of automated vehicles, connected cruise control, and experiments with connected automated vehicles.
| [B01] | Orosz, Molnar, Dynamics and Control of Connected Vehicles, Springer 2025 |
Connected Heavy-duty Trucks
In collaboration with Navistar, we depeloped longitudinal controllers for safe and energy-efficient driving of connected automated trucks.
The controllers leverage road elevation data and information about preceding vehicles from on-board sensors and vehicle-to-vehicle (V2V) connectivity.
We tested the proposed controllers in experiments using a full-scale heavy-duty vehicle, both on a closed test track and on public highways.
Control of Connected Automated Vehicles
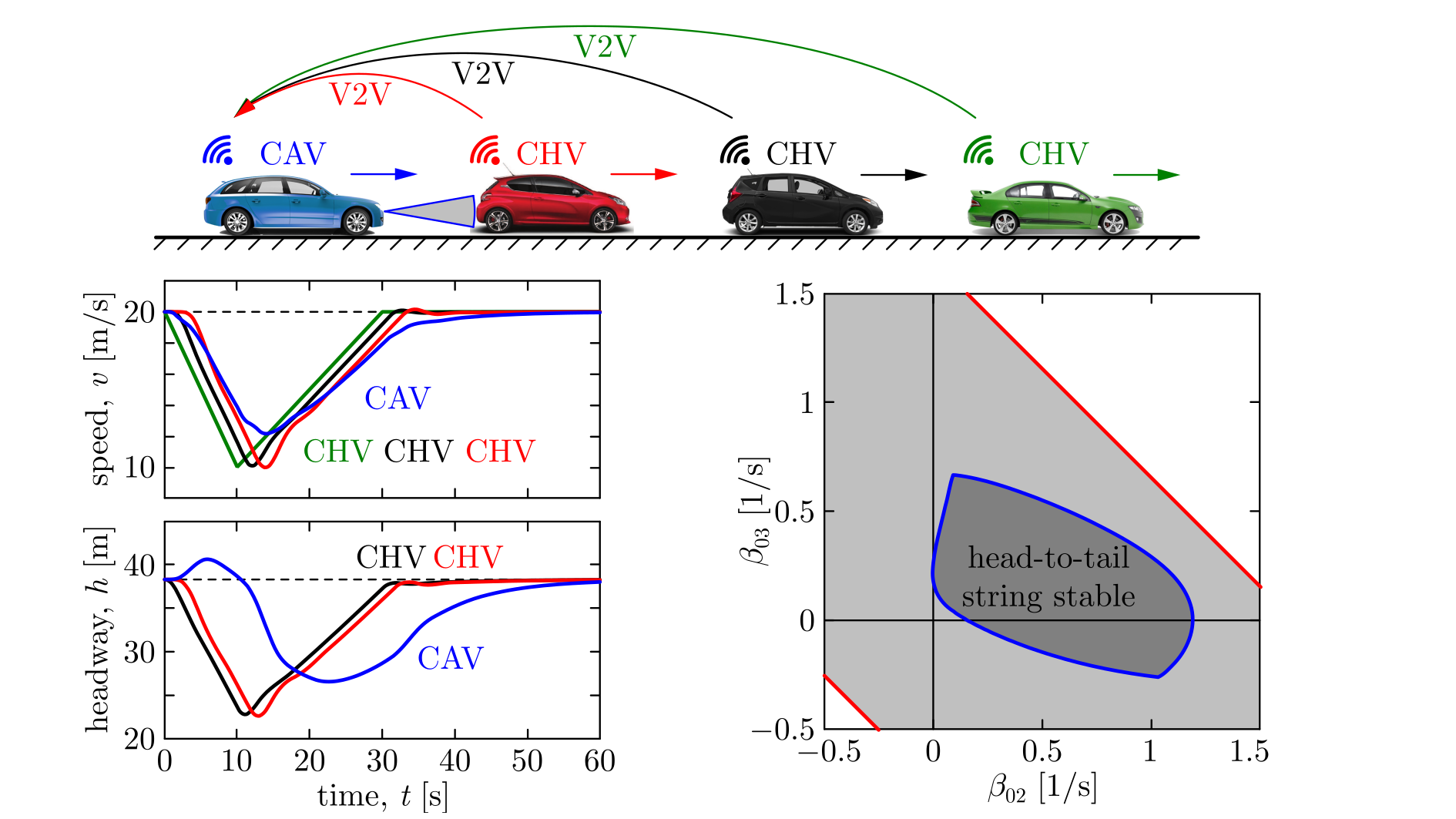
We introduced connected cruise control (CCC) strategies by which connected automated vehicles can regulate their logitudinal motions while responding to multiple vehicles ahead of them.
We studied stability and smoothness of driving behavior, the effect of communication, feedback and actuation delays, energy-efficiency and safety.
Traffic Control by Connected Automated Vehicles
We studied the behavior of mixed traffic systems where human drivers and connected automated vehicles (CAVs) coexist.
By leveraging connectivity, CAVs can regulate their motions such that they make the overall traffic flow smoother, that ultimately mitigates traffic jams and improves mobility.
Traffic Prediction for Connected Vehicles
In collaboration with Ford, we depeloped an on-board traffic prediction method that provides speed previews for vehicles via vehicle-to-vehicle (V2V) connectivity.
Prediction was implemented on a physical vehicle and tested in real highway traffic.
Time Delay Systems
Safety of Time Delay Systems
We developed a control framework to achieve formal guarantees of safe behavior for control systems that have time delays in their control loops.
The frameworks covers systems with input delays and state delays.
Control of Epidemiological Models
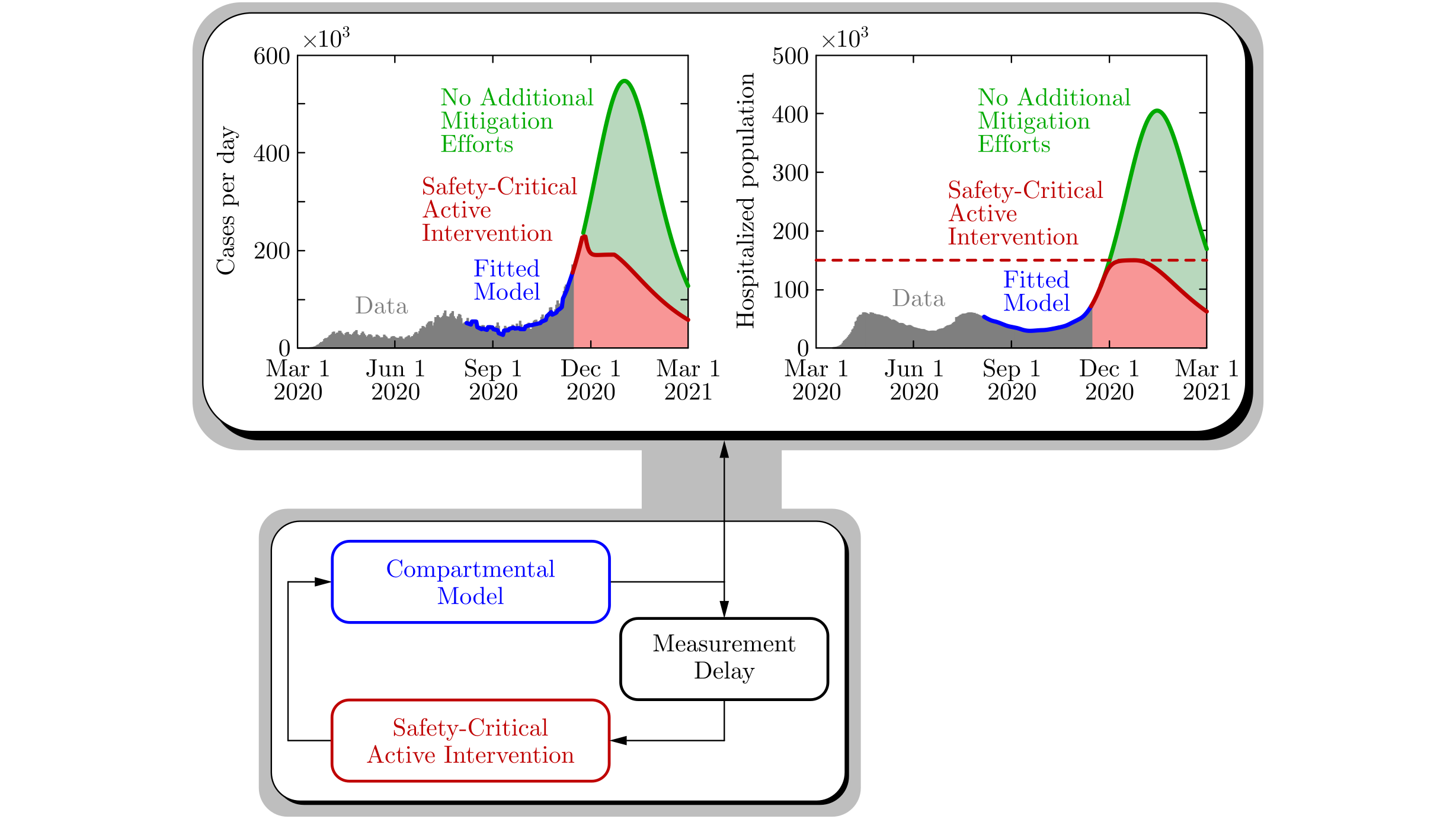
We established controllers for epidemiological models that describe the spread of Covid-19.
These controllers give guidance on the required human intervention for mitigating the spread of the virus and for providing safety with respect to the level of infection or hospitalization.
Click on the image for a press release of our work.
Machine Tool Vibrations
We studied the behavior of delayed dynamical models describing machine tool vibrations in metal cutting processes such as turning and milling.
Through stability and bifurcation analysis, we identified those choices of technological parameters that enable manufacturing engineers to avoid harmful vibrations (chatter) during the cutting process.
Predictor Feedback Control
We investigated predictor feeback control techniques to overcome the detrimental effects of time delays in control loops (i.e., sensory, communication, feedback and actuation delays).
We leveraged these methods in the context of controlling connected automated vehicles, epidemiological models and safety-critical time delay systems.